
文章标题:UKF - 概述与应用
在许多算法应用中,无迹卡尔曼滤波(Unscented Kalman Filter,简称UKF)已经成为一个不可或缺的工具。本文将详细介绍UKF的基本原理、应用场景以及其在实际问题中的使用方法。
一、UKF的基本原理
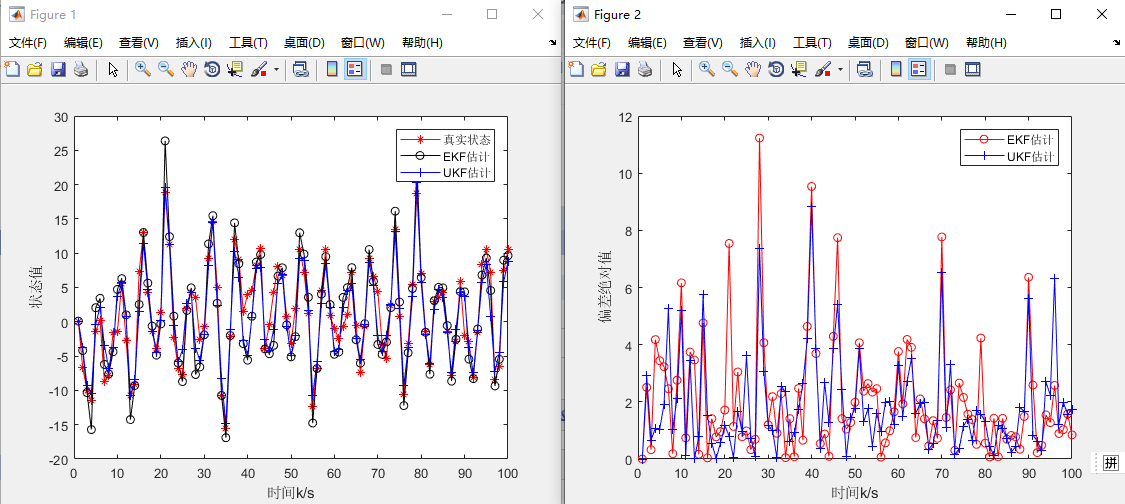
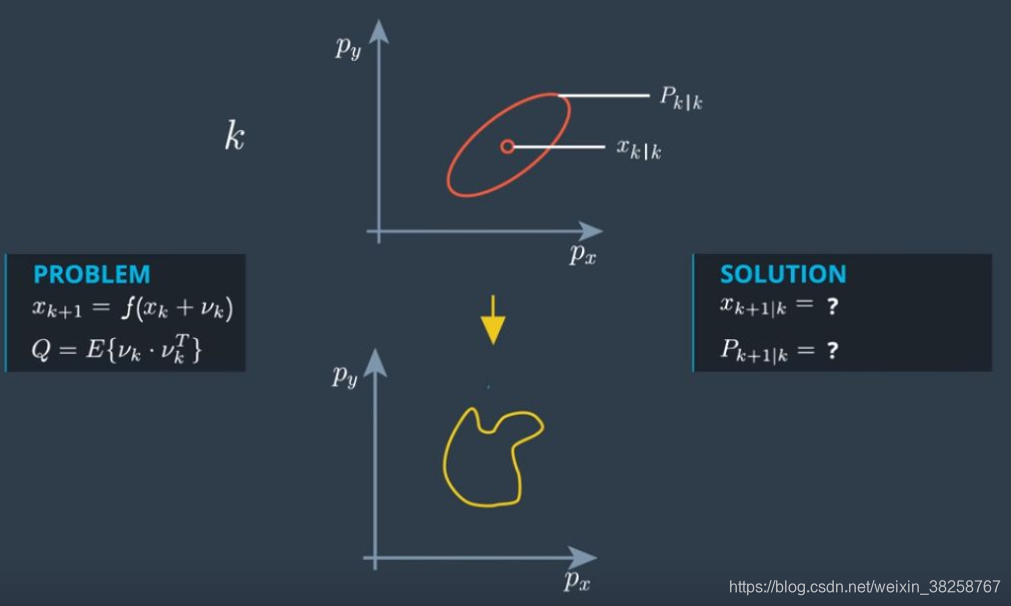
UKF是一种非线性滤波算法,它基于无迹变换(Unscented Transform,UT)和卡尔曼滤波(Kalman Filter)的原理。与传统的扩展卡尔曼滤波(EKF)相比,UKF在处理非线性系统时具有更高的精度和稳定性。
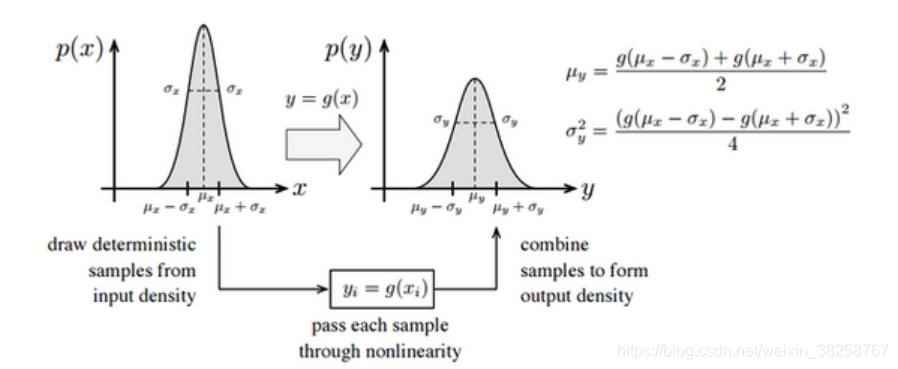
在UKF中,通过一组sigma点集的采样和变换来逼近系统的非线性特性。这些sigma点集由UT算法生成,其核心思想是在不进行一阶泰勒展开的前提下逼近均值和协方差,因此能够在高阶的非线性问题中提供更为精确的估计。
二、UKF的应用场景
由于UKF的高精度和非线性处理能力,它在许多领域都得到了广泛的应用。在机器人导航、自动驾驶、目标跟踪等领域中,UKF常被用于状态估计和传感器数据融合。此外,在通信、信号处理、计算机视觉等领域也都有着广泛应用。
三、UKF的实际应用
在目标跟踪的场景中,通过融合不同类型传感器的数据(如雷达、摄像头等),我们可以利用UKF进行精确的状态估计。具体步骤包括:首先根据传感器数据生成sigma点集,然后通过UT算法将这些点集变换到状态空间中,最后根据变换后的点集计算状态估计值和协方差矩阵。
在机器人导航中,UKF可以用于估计机器人的位置和姿态。通过将机器人的运动模型和传感器数据融合在一起,我们可以得到更为准确的机器人状态估计。此外,在自动驾驶等场景中,UKF也被广泛应用于车辆的状态估计和路径规划。
四、总结
总之,UKF作为一种非线性滤波算法,在许多领域都得到了广泛的应用。其高精度和非线性处理能力使得它在状态估计和传感器数据融合等问题中具有显著的优势。未来随着技术的不断发展,UKF将在更多领域得到应用,为我们的生活和工业生产带来更多的便利和价值。
标签:
- UKF
- UnscentedKalmanFilter
- 基本原理
- 非线性处理能力
- 应用场景
- 传感器数据融合